How a Robot Finds Itself
Industrial environments offer no GPS signals and few distinguishable landmarks. DIDEN Robotics solves this by using a ship's CAD drawings as the reference map, building a real-time pipeline that estimates the robot's position and orientation. Because CAD is available from the design stage, the same map serves throughout block assembly and the vessel's operational life. The system has been validated in both simulation and real-world conditions. This is the navigation state estimation pipeline from DIDEN Robotics — a Physical AI company built for industrial environments.
Between dark steel bulkheads, a DIDEN Robotics robot comes to a halt. The space around it repeats — identical stiffeners running across the inside of a ship. Before the robot takes another step, one question must be answered: “Where am I right now, and which way am I facing?”
The technology that answers this question in real time is state estimation. The second of the three pillars an autonomous robot needs (perception, state estimation, locomotion control), it is the gate every robot must pass through after sensing its surroundings, before it can take another step.
Part 1, Building a Robot’s Eyes, covered perception — the stage where a robot ‘sees’ and understands its surroundings. This installment covers the next stage: finding where the robot itself is, inside the world it has just seen.
How a Robot Locates Itself
What feels effortless to a person — answering “where am I” even with eyes closed — is one of the hardest problems in robotics. None of the information available to the robot is perfect: stride length from encoders, joint angles from IMUs, the surrounding geometry seen by cameras and lasers. A slipping foot throws off the stride estimate; sensor noise destabilizes observations.
So the robot has to combine all this uncertain input and estimate the most likely value. It isn’t finding the “correct” position — none is accessible. It is synthesizing observation and prediction to find the best available approximation of the truth. This process is state estimation.
An Extreme Environment Inside the Ship
In ordinary indoor environments, well-established solutions exist: GPS, wall-mounted feature points, ceiling markers. None of these conveniences work in the industrial sites where DIDEN Robotics' robots operate.
Picture the inside of a ship. A steel structure that blocks external signals. Bulkheads and stiffeners repeat throughout, leaving one section indistinguishable from the next, even by eye. Inside a block under assembly at a shipyard, welding sparks, dust, and moving structures generate sensor noise. Onboard a ship in service, vibration, lighting changes, and tight, complex corridors get in the way.
These environments share one challenge: a robot cannot easily distinguish “this is Area A, that is Area B.” Looked at purely as geometry, the two sections appear almost identical. Conventional methods that depend on distinct feature points hit a hard limit here.
Using CAD Drawings as the Robot's Map
DIDEN Robotics flipped the approach. Rather than building a new map from sensor data, the team uses the design drawings that already exist as the map itself.
Ships are inherently well-suited to this strategy. Detailed 3D CAD models exist from the design stage, and these drawings remain valid not just during block construction but throughout the vessel's operational life. By using CAD directly as the robot's reference map, the robot starts every deployment already holding the “answer key.”
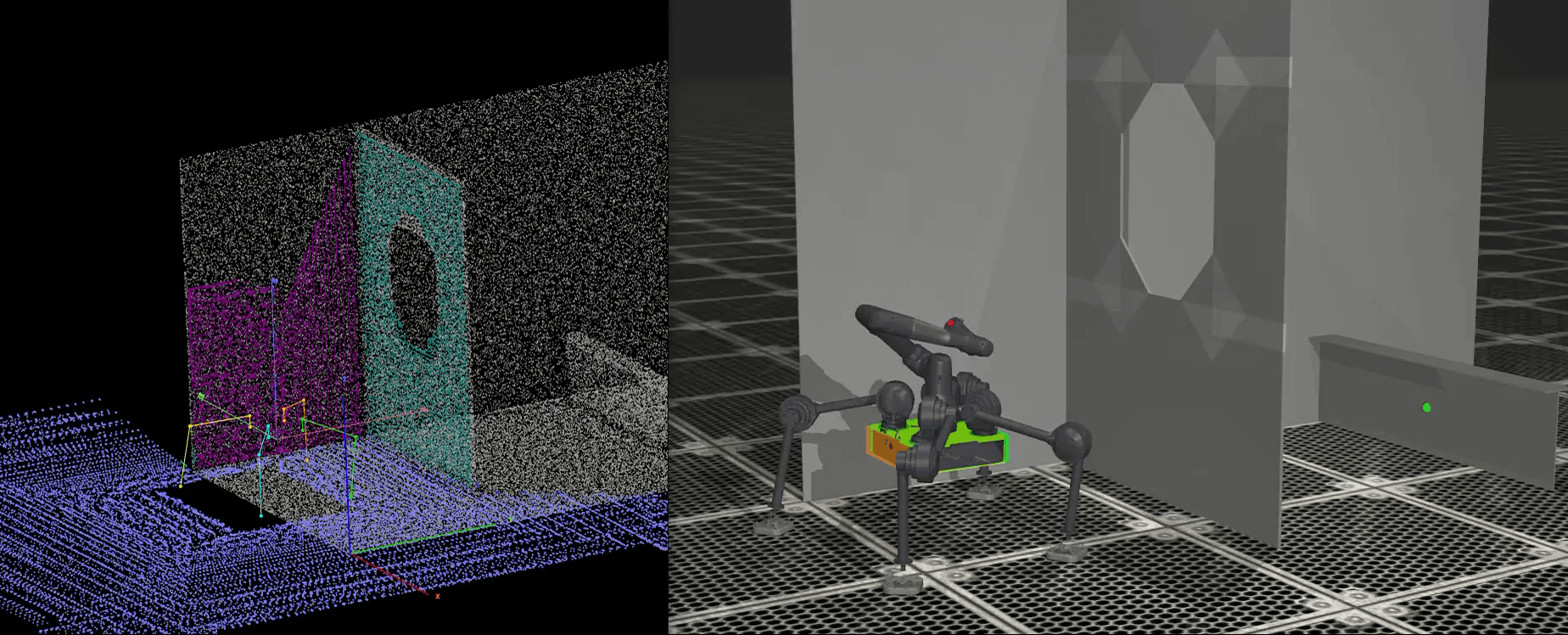
The pipeline is simple. Sensors mounted on the robot scan the surroundings in real time, producing a point cloud. That scan is compared against the pre-loaded CAD map. The pose at which the two shapes overlap most closely is the robot's current position and orientation.
One clarification: what this article describes is the navigation state estimator. It is a module that matches vision sensor data against CAD drawings to answer “where am I on the map?” at roughly 10 Hz, used by the robot to keep track of its position across the workspace and plan its path.
A different state estimator handles real-time joint-level control during walking. That one fuses encoders and IMUs at roughly 1000 Hz — a separate control state estimator, distinct from the module covered here, and a topic we will return to in a future post.
CAD-based real-time state estimation — simulation test
Running Algorithms Without the Hardware
One development strategy from DIDEN Robotics deserves a mention here: pre-recording sensor datasets in a reproducible form.
Running a real robot for a single experiment costs significant time and money. Setting up hardware, preparing the environment, and verifying safety must be repeated each time. That tempo is far too slow for the dozens of algorithm iterations a development cycle requires.
So DIDEN Robotics records raw sensor data in test environments and packages it as datasets. Because the team designed and built everything in-house, from the robot itself to the sensor stack, they have full control over which sensors are recorded and under what conditions. With these datasets in place, algorithm changes no longer require rerunning the hardware. Replaying the data reproduces the exact same situation. Developers swap algorithms and run comparative experiments, and the time eliminated from physical setup compresses the entire development cycle.
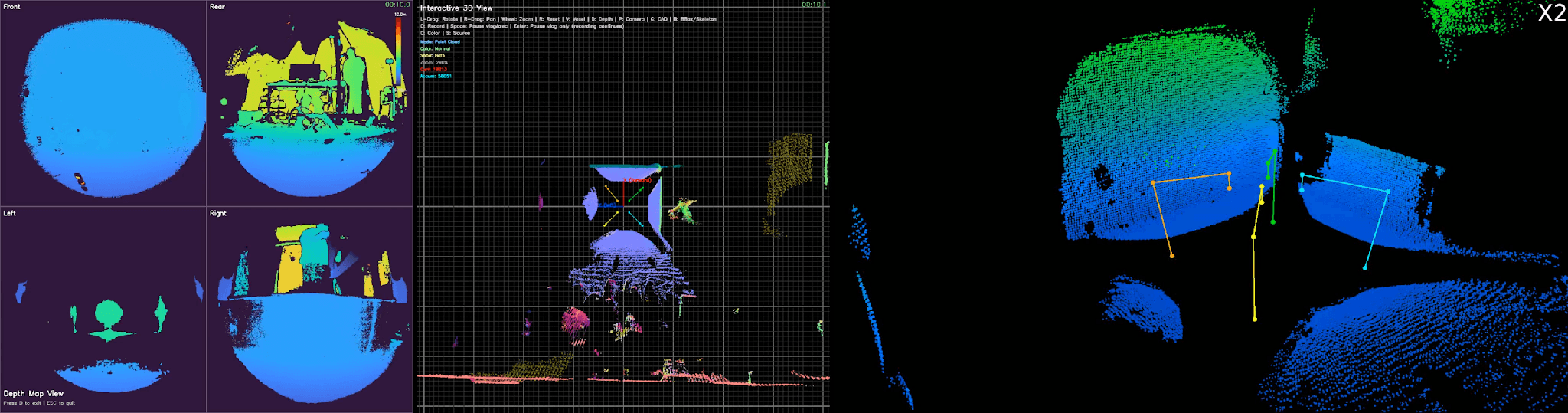
Replay results from a pre-recorded real-world sensor dataset
Beyond Simulation, into the Real World
The algorithm was first validated in simulation. Diverse robot trajectories were generated inside a virtual block environment, and the CAD-based state estimator was measured against ground truth to see how closely it tracked the actual path. Only after the simulation results held up did testing move to real-world conditions.
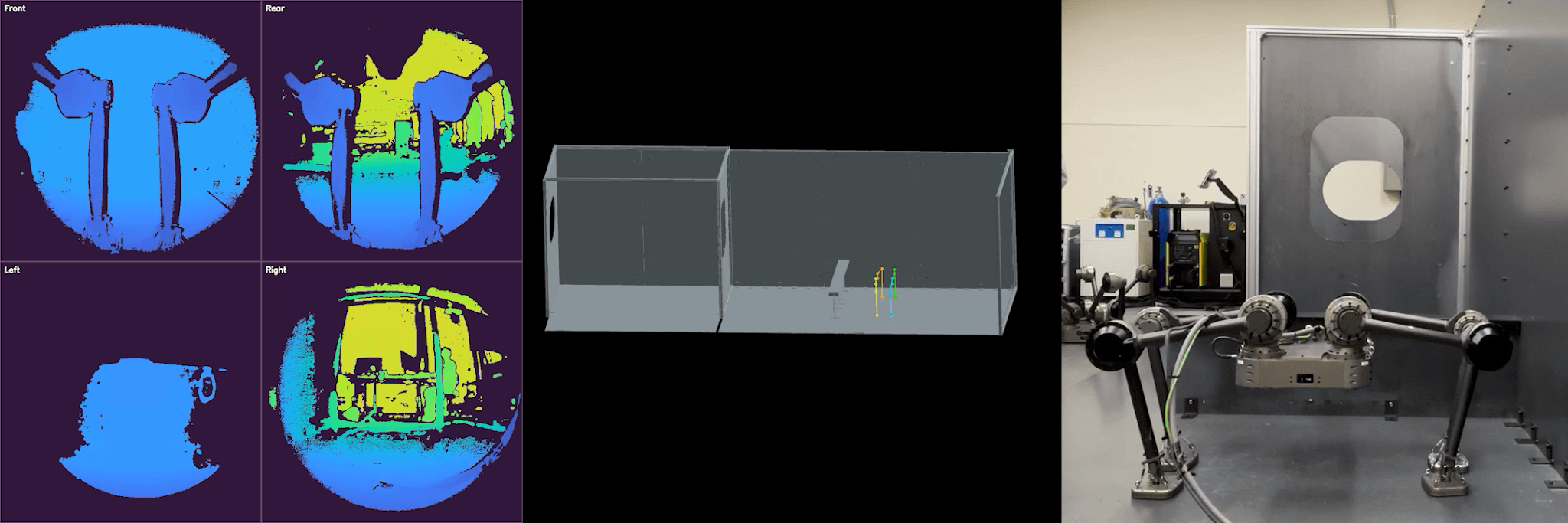
CAD-based state estimation — real-world test
In the real-world test, the robot moved through an actual block structure while state estimation ran. The aim was to confirm that the pipeline designed in simulation produces the same outcomes in the physical world: that sensor scans align with CAD correctly, and that the estimate holds continuously as the robot moves.
Confirmed on both fronts, the pipeline no longer lives only in the lab. DIDEN Robotics' robots are already at the stage of performing actual welding tasks inside blocks at major shipyards in Korea — work that becomes possible only when the robot knows exactly where it is.
What Comes Next: AI That Finds the Starting Point
The pipeline continues to evolve. The current version still includes one manual step: the user must first tell the robot roughly where on the CAD map it is starting from. Given just an approximate starting pose, the robot maintains its position from there on its own. The pipeline is now evolving so that AI handles even this initial input.
At the core of this evolution is AI-based global localization: dropped into a site with no prior information, the robot determines where it is on the CAD map from a single scan of its surroundings. This is the next step in extending CAD-based state estimation toward fully autonomous operation.
AI-based global localization
The real-world dataset itself extends in the same direction. What began as a tool for algorithm experimentation is becoming the foundation for refining the mapping model itself. As field data accumulates, the model grows more precise alongside it — a virtuous cycle between deployment and capability.
Bridging CAD and the Real World, in Real Time
State estimation is the underlying coordinate frame a robot needs to move and work. Synchronizing design drawings with the physical site in real time means more than locating the robot. Work points marked on the drawing must align exactly with their actual locations in the field — only then can the robot read the drawing and execute the process. When DIDEN Robotics' Spider locates welding points inside a shipyard block, it operates on this same CAD-based coordinate frame. Wherever a design drawing exists at an industrial site, the same approach can be extended.
After perception gave the robot its eyes, state estimation gives it a sense of where it is. Building the entire stack in-house — from hardware design to environmental recognition to self-localization — is what defines DIDEN Robotics as a Physical AI company built for industrial environments. The next installment will cover locomotion control, the layer where the robot finally takes its first step on top of these two foundations.
South Korea
©Copyright DIDEN Robotics. All Right Reserved
Terms of Service
|
Privacy Policy
|
Legal Notice
|
Prohibition of Unauthorized Email Collection
Diden Robotics Co., Ltd.
|
Representative: Junny(Joon-Ha) Kim
|
Contact: diden@didenrobotics.com / Phone: 02-6959-0642 / Fax: 02-6959-0643
|
49 Achasan-ro 17-gil, Seongdong-gu, Seoul, Rooms 401, 402, 409, 410 (04799)
|
Business Registration Number: 867-87-03056
DIDEN ROBOTICS