Physical AI Walks the Wall - DIDEN Robotics at NVIDIA GTC 2026
DIDEN Robotics' Spider 30 opened NVIDIA GTC 2026. From magnetic adhesion control to RL-based locomotion and autonomous path planning—Physical AI, dissected.

Why This Matters Now
In the opening video of NVIDIA GTC 2026, a robot appeared walking freely across the vertical hull of a massive ship. A quadruped, climbing steel walls on magnetic feet. That robot was Spider 30, built by DIDEN Robotics.
NVIDIA GTC 2026 opening video featuring DIDEN Robotics
As the world focuses on Physical AI, this robot is already at work in real industrial environments.
South Korea builds more ships than any other country on Earth. But step inside one of those vessels during construction, and you'll find a different reality. Vertical steel walls stretching 30 meters high. Confined blocks barely 2 meters wide. Temperatures exceeding 40°C, toxic fumes, welding sparks. All work performed by hand, on scaffolding, at more than double the manufacturing average for industrial accidents.
DIDEN Robotics solved this problem. Inside active shipbuilding sites operated by Korea's leading shipbuilders, a quadruped robot now walks freely across vertical surfaces and ceilings. Its welds have been applied to real vessels in production.
Physical AI: The Technology Behind Robots That Work in the Real World
Getting a robot to walk on walls and perform welding is not a single-technology problem. It requires multiple technologies working simultaneously and in coordination:
Magnetic adhesion — gripping and releasing the wall surface at precisely the right moment
Locomotion control — maintaining balance and walking against gravity on vertical surfaces
Autonomous navigation — planning paths through environments that can't be mapped in advance
State estimation — tracking the robot's posture and position in real time
Task execution — performing precision welding once the robot reaches its target
When all of these are integrated into one system, a robot can finally "work" in the field. A robot that perceives its environment, makes decisions, and moves on its own. That is Physical AI.
DIDEN Robotics develops every one of these technologies in-house. The team designs actuators optimized for wall-climbing, builds reinforcement-learning-based control algorithms from the ground up, trains locomotion policies in simulation, and transfers them to real hardware—all within a single organization. No wall between hardware and software.
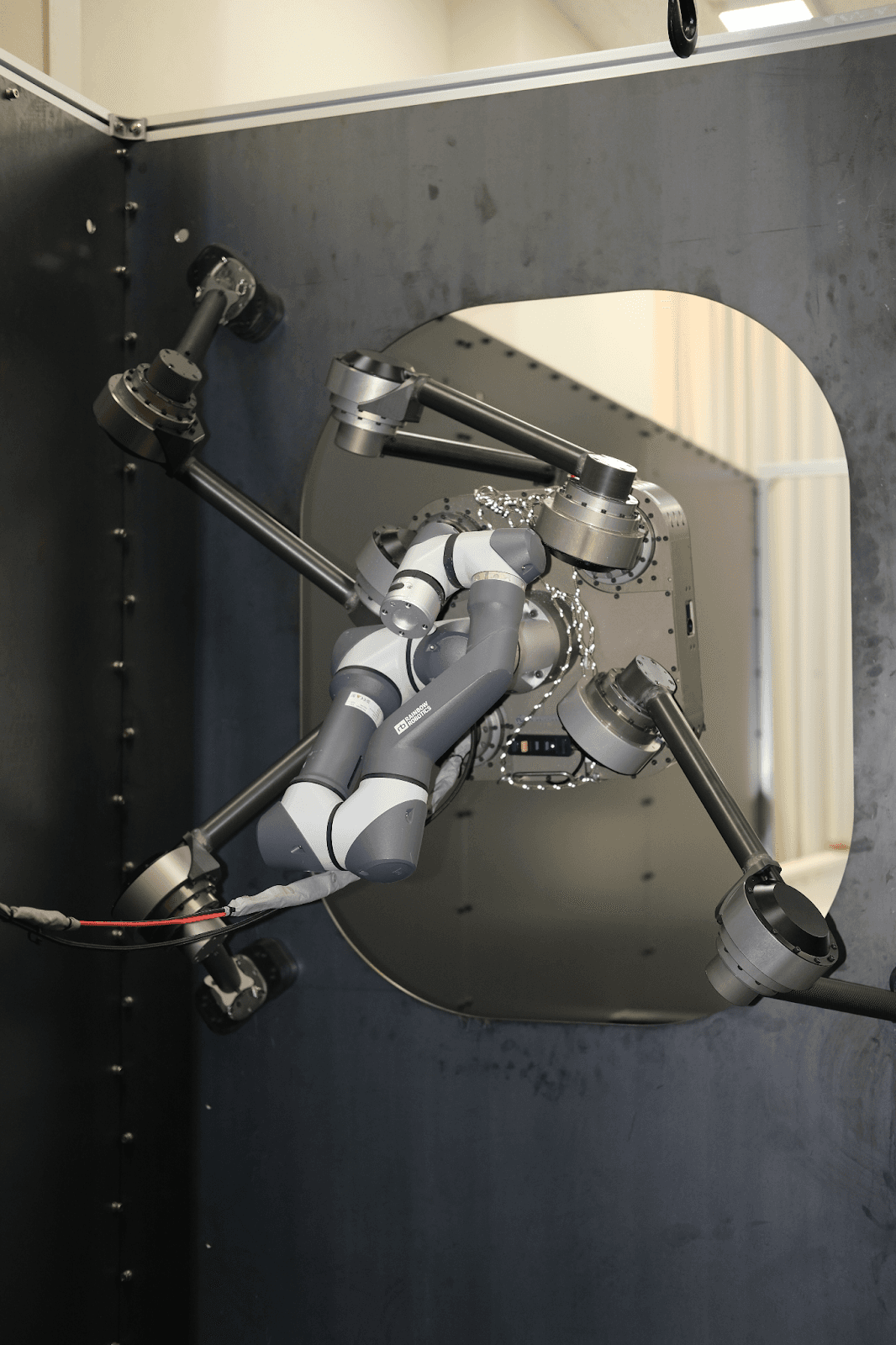
Spider 30 quadruped walking robot
The Magnetic Foot: Where Wall-Climbing Begins
The starting point for wall-climbing is the magnetic foot.
There are three types of magnets that can enable wall-climbing. Permanent magnets are strong but cannot be turned off. Electromagnets can be controlled with current, but require continuous power to maintain their magnetic hold.
An electropermanent magnet, or EPM, combines the strengths of both: a single electrical pulse switches the magnetic state between ON and OFF, and once switched, the state holds without any power.
Permanent Magnet | Electromagnet | EPM | |
ON/OFF Control | Not possible | Yes (current) | Yes (pulse toggle) |
Power Consumption | None | Continuous | Only during switching |
Suitability | Low | Medium | High |
The foundational principles behind EPMs were developed at research institutions including KAIST. DIDEN Robotics holds a commercial license for this technology and has engineered it to perform reliably on the rough steel surfaces found in real industrial environments.
But a robot working on walls needs to do far more than hold on. It must traverse vertical surfaces, navigate around obstacles, and perform precision welding at designated targets. The magnetic foot is the starting point for all of this—yet it only becomes useful when combined with locomotion control, autonomous navigation, state estimation, and reinforcement learning working together as one system.
The AI That Walks on Walls
On a vertical surface, gravity pulls the robot downward at all times. The moment one foot lifts, the remaining three must support the robot's full weight plus its working payload.
DIDEN's locomotion control system estimates each foot's contact state, magnetic holding force, and the robot's posture in real time to determine the next movement. Rather than replaying fixed motion patterns, it generates optimal actions adapted to conditions that change from moment to moment.
Shipyard interiors are too complex and variable to map in advance. Weld beads, stiffeners, pipes, unexpected obstacles. The robot must perceive its environment, plan an optimal route to the target, and respond to unexpected changes in real time. DIDEN's autonomous navigation system makes this possible.
On top of this, reinforcement-learning-based control is being integrated. Optimal locomotion policies are trained through thousands of simulated trials, then transferred to physical hardware through a sim-to-real pipeline. To minimize the gap between simulation and reality, DIDEN designs its own actuators and builds its simulation models in-house. This is only possible because the team builds both the hardware and the software.
The culmination of this work is Spider 30, a quadruped walking robot with a 30kg payload capacity that moves freely across vertical walls and ceilings on steel structures. Spider 30 has completed field deployment at major Korean shipyards, and its welding results have been applied to vessels in production.
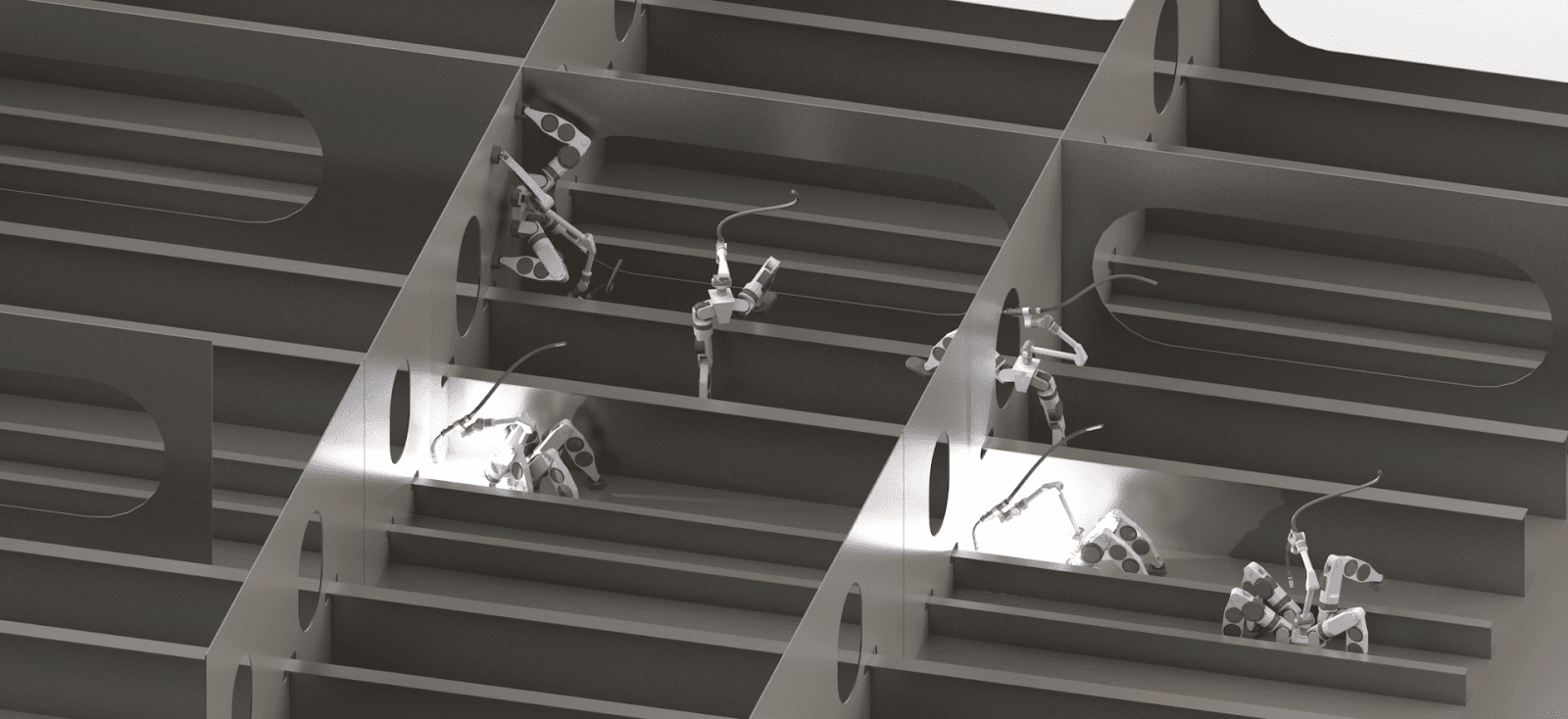
Spider 30 3D rendering — working inside ship structure
From Shipyards to What Comes Next
The capabilities proven in shipyards, one of the most extreme industrial environments on Earth, do not end there.
Locomotion control on irregular terrain, autonomous path planning, real-time state estimation, reinforcement-learning-based motor control. These are not niche technologies specific to wall-climbing robots. They are foundational capabilities for any robot that needs to move autonomously in the physical world.
Building on this foundation, DIDEN Robotics is developing an industrial humanoid robot, DIDEN Walker. The team completed the full development cycle for the lower body, from mechanical design to walking control, in three months. It achieved successful locomotion on the very first physical test. The control expertise accumulated in shipyards transfers directly to entirely new robot form factors.
Magnetic feet, locomotion control, autonomous navigation, state estimation, reinforcement learning, simulation, actuator design. From hardware to software, DIDEN Robotics builds the technologies a robot needs to operate in the physical world. Starting from shipyards, extending to every industrial environment where robots are needed.
South Korea
©Copyright DIDEN Robotics. All Right Reserved
Terms of Service
|
Privacy Policy
|
Legal Notice
|
Prohibition of Unauthorized Email Collection
Diden Robotics Co., Ltd.
|
Representative: Junny(Joon-Ha) Kim
|
Contact: diden@didenrobotics.com / Phone: 02-6959-0642 / Fax: 02-6959-0643
|
49 Achasan-ro 17-gil, Seongdong-gu, Seoul, Rooms 401, 402, 409, 410 (04799)
|
Business Registration Number: 867-87-03056
DIDEN ROBOTICS