Why DIDEN Robotics Builds Its Actuators In-House
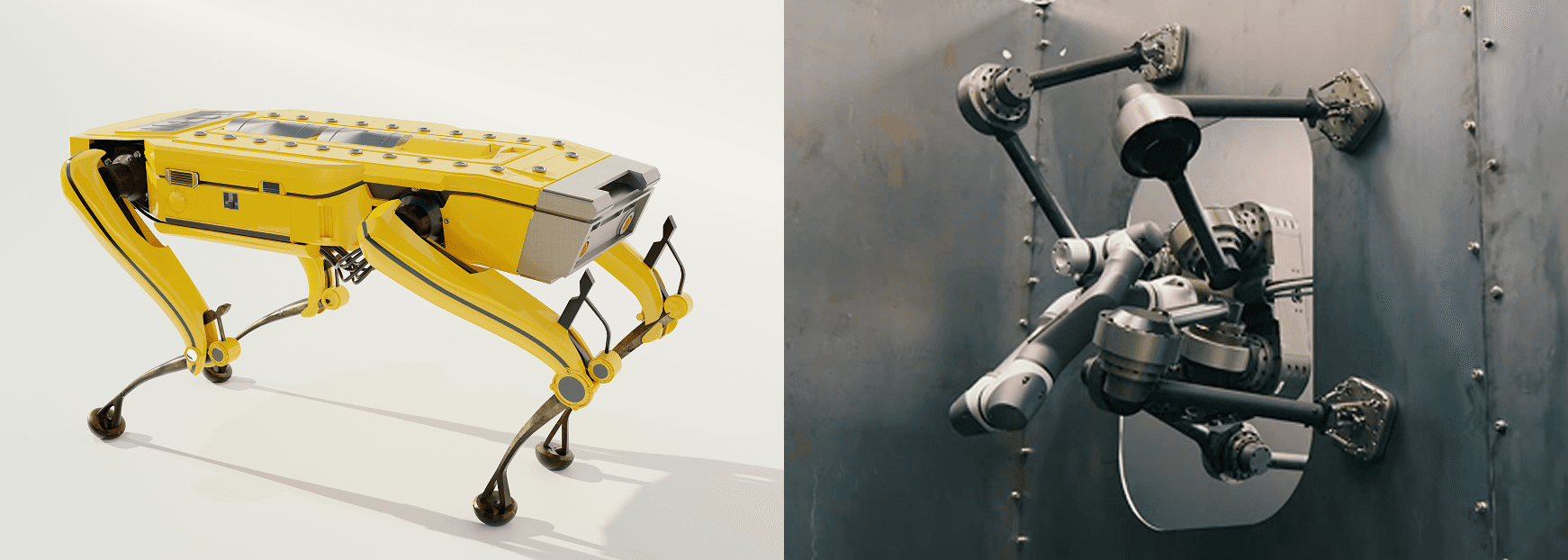
DIDEN Robotics designs and builds the actuator — the part that plays the role of the robot's muscle — in-house, because off-the-shelf options rarely satisfy four industrial-site conditions at once: close to 30 kg of welding equipment, the impact a magnetic foot delivers, an access hole sized for a single human, and the business reality of shipping not as one prototype but as tens or hundreds of units. The quadrupedal robot and the bipedal platform were built on the same in-house actuator module. A design note from DIDEN Robotics, the Physical AI company built for industrial environments.
DIDEN Robotics' quadrupedal robot and bipedal platform were built on the same in-house actuator module. Rather than picking commercial actuators off the shelf, the team designed and built actuators whose specs were anchored on industrial-site conditions from the start.
An industrial-site robot actuator is not just a component that has to support weight. Around 30 kg of equipment on the back, the impact transmitted to the foot every time a magnetic foot lands on a steel surface, an access hole sized for a single human body, and the business reality that the robot will ship not as one prototype but as tens or hundreds of units — every one of these has to be absorbed, in the end, by the actuator that plays the role of the robot's muscle.
This is a design note on how DIDEN Robotics builds those actuators in-house to make a robot that actually fits an industrial site.
Four Conditions an Industrial-Site Actuator Has to Meet
An industrial-robot actuator has to meet four conditions at once that a general-purpose robot actuator does not.
Enough torque to lift heavy equipment — An industrial welding robot has to carry around 30 kg from the wire feeder alone, with the torch and a manipulator adding roughly another 16 kg. Combined, they put close to the weight of an adult human on the back of a single robot, and the torque per leg climbs far above what a flat-floor walker has to handle. A bipedal humanoid carries one more layer on top: climbing ladders and similar motions force the legs and arms to handle the entire body, pushing joint torque higher again.
Resilience against the impact a magnetic foot creates — A robot using magnetic feet to move freely across steel surfaces slams its toe into the surface every time a foot lands. That shock travels every step into the motor and the gearbox.
A footprint small enough for narrow passageways — Industrial-site workspaces are reached through access holes and bulkheads sized for a single human body. Leg length and torso width are bounded, and so is the actuator volume that has to fit inside them.
A structure simple enough to manufacture at scale — A single robot uses more than twelve actuators. High part counts and complex machining drive unit costs up — tolerable for one prototype, a real problem the moment volume production starts.
Off-the-shelf actuators that meet all four at once are not easy to find. Only a handful of teams in the global humanoid market are even targeting a sustained payload anywhere near 30 kg. Among the commercial motors DIDEN Robotics looked at, not a single one met the team's torque, stiffness, and durability requirements at once.
So DIDEN Robotics stepped one level back and chose to build the actuator itself.
Working Backward From the Worst Case
DIDEN Robotics' quadrupedal robot took a spider-like form because, when specifications are pulled back from the worst case, a mammalian quadruped does not fit.
The design started from a sketch of where the robot would work. DIDEN Robotics assumed a robot that moves and works inside a narrow, enclosed block bounded by bulkheads, carrying close to 30 kg of equipment. From that concept, the spec was pulled back one number at a time, starting from the most punishing moment.
The first number is torque. The robot lifts one leg to reach the next foothold; only three legs remain in contact with the surface, and those three have to carry the full 30 kg payload. From that posture the team works out how the load is distributed and what torque the most loaded motor has to produce. That number becomes the floor of the actuator spec.
The second is the length of the leg. Between bulkheads, thigh-high stiffeners (longis) sit at regular intervals, and the robot has to step over them to reach the next compartment. The leg length is set as the minimum that clears those stiffeners.
The third is the width of the torso. The access holes that link work spaces are passages sized for a single human body. The torso has to fit through.
Once torque, leg length, and torso width are all set, a sketch of one robot emerges, and the team can begin the search for actuators that meet that spec.
The limit of the standard mammalian form shows up at this point. A mammalian quadruped — legs hanging down from each side of the body, like a dog or a horse — is fast on flat ground, but the moment the robot rotates on a vertical wall, only some of the motors can contribute torque. The foot pad cannot land squarely against the surface, and producing enough torque becomes difficult.
A spider-like form solves this in one step. With legs arranged radially around the body, every motor can contribute torque when the robot is on a vertical wall, and each foot lands close to perpendicular to the surface. A mammalian quadruped is faster across flat floors, but in an industrial site, payload capacity and obstacle traversal matter more than top speed.
A mammalian quadruped versus a spider-form quadruped. More motors can contribute to the torque required for vertical-wall motion in the spider form than in a mammalian form.
A Simple Structure That Withstands Heavy Impact
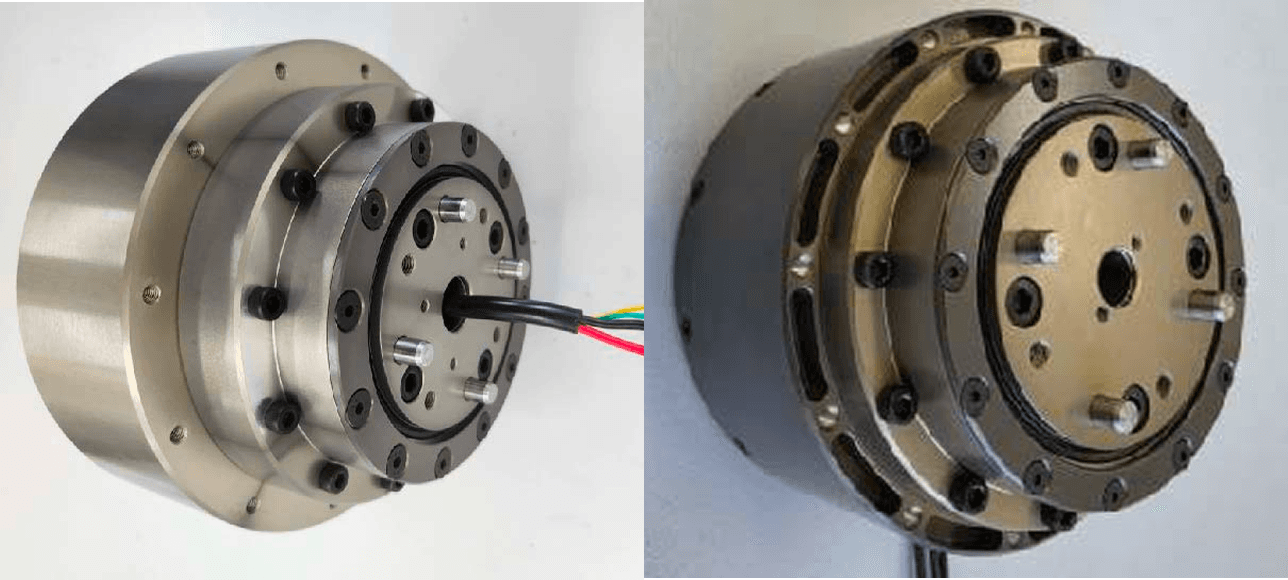
DIDEN Robotics' in-house actuator is an impact-resilient planetary-gear reducer built as a single hollow-shaft module. Motor, gears, frame, motor driver, and wiring all sit inside one part.
The planetary gear was chosen for two reasons.
Impact resilience — The shock a magnetic foot delivers on every step is far heavier than what a precision walking robot has to absorb. A harmonic drive is precise but fragile under impact. A planetary gear accepts a small amount of backlash (the tiny play between gear teeth) in exchange for surviving heavy shock loads.
Structural simplicity — Fewer parts, less demanding machining, a reasonable unit cost at volume. With more than twelve actuators per robot, ease of maintenance is a meaningful commercial advantage.
On top of that, the motor, gears, frame, motor driver, and wiring were combined into a single module — a hollow-shaft actuator with wiring running through the central axis. Rather than assembling parts from external suppliers, the team designs, assembles, and quality-tests the core elements themselves.
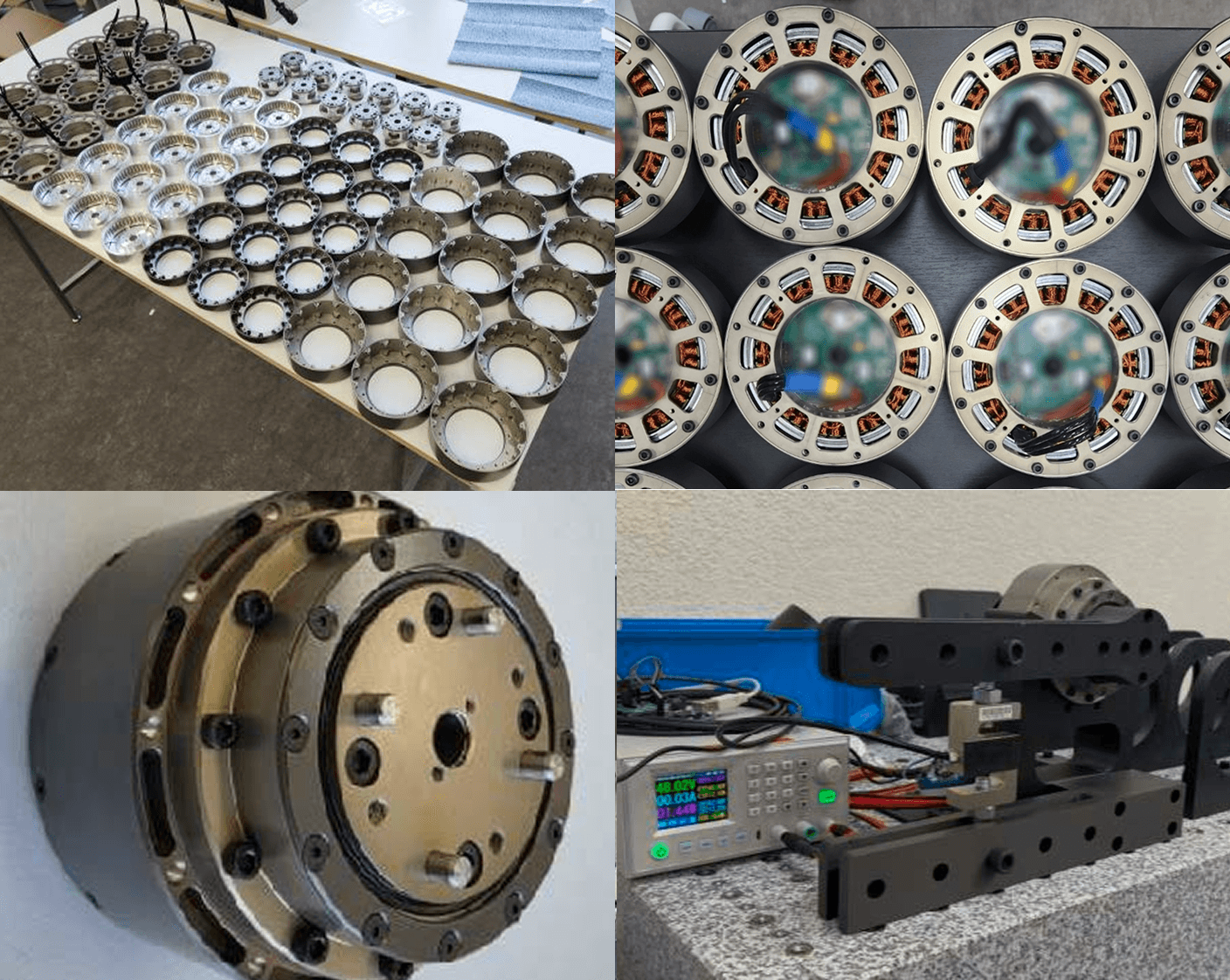
DIDEN Robotics' in-house hollow-shaft actuator integrates gears, frame, motor driver, and wiring into a single module.
The Fastest Path to Validate: Rotary Motor + Planetary Gear
The starting point of DIDEN Robotics' in-house actuator is the combination of a rotary motor and a planetary gear. A linear actuator is another way to do it, but for DIDEN Robotics' industrial conditions, the drawbacks of a linear actuator outweighed its strengths.
A linear actuator converts a rotary motor's rotation into linear motion through a ball screw or a roller screw, moving the joint in a way that resembles human muscle. Several leading humanoid teams have adopted this approach for the lower body, and it offers real strengths: an intuitive load path, high reduction ratios in a tight envelope, and freedom to place the motor away from the joint axis.
Compared with DIDEN Robotics' choice — a rotary motor with a planetary gear — a ball-screw structure is more vulnerable to the impact a magnetic foot delivers, and the higher part count drives manufacturing cost up faster. The moment arm shifts with joint angle, the range of motion is narrower, and back-drivability is poorer.
Both routes coexist in the industry, and neither is categorically right. DIDEN Robotics judged that a rotary motor + planetary gear + in-house hollow-shaft module would meet industrial-site conditions first and could be validated the fastest.
Smaller and Stronger Actuator
DIDEN Robotics' in-house actuator advanced one generation from the initial model, becoming about 6% smaller while producing about 14% higher torque density. The same job can now be done in a smaller volume with more force.
Torque density (the torque available per unit of mass) is one of the key specs to consider for an industrial robot actuator that has to carry heavy equipment while moving and working. On that measure, DIDEN Robotics' next-generation unit sits in the upper range when placed alongside off-the-shelf actuators from the major suppliers.
The number itself matters less than what it enables: a robot that can deliver more force inside a smaller industrial volume. Because the actuator became smaller and its torque density rose at the same time, the quadrupedal robot now carries the same payload on lighter legs, and the bipedal platform's legs fit through human passageways while still carrying around 30 kg of work equipment.
Quadruped and Biped Share the Same Muscle
DIDEN Robotics' quadrupedal robot and bipedal platform were built on the same in-house actuator module. The forms differ, but the unit inside a quadruped's leg joint is the same unit that goes into the bipedal platform's lower-body joints.
Sharing the same module creates a series of advantages.
Development velocity — An actuator validated on one platform drops directly into the other. The bipedal platform reached working two-legged walking in just three months — from in-house hardware to walking control — because the actuator inside it had already been proven on the quadruped.
Manufacturing efficiency — Two robot platforms sharing the same core part means a single supply, production, and quality-control line for that component. Compared with building two separate robot product lines, manufacturing cost falls considerably.
Sim-to-real alignment — A robot assembled from external parts carries a hidden gap inside it: the small but persistent difference between the spec-sheet number and the actual part's response. Gears have backlash that does not appear on the data sheet. Aluminum structures sag a tiny amount under load. With in-house actuators, the team can quantify these properties directly and fold them back into the simulation, so a policy trained on top of it runs stably on real hardware.
What matters is that an industrial site, depending on the situation, needs both forms of robot. A quadruped is strong on heavy-load transport; a biped is strong on obstacle clearance. The quadrupedal robot moves freely across steel surfaces using magnetic feet and carries heavy work equipment, while the bipedal platform threads through infrastructure built for people — narrow passages, ladders, stairs — and uses it as-is.
The bipedal platform's lower body, built around the same in-house actuator module. The platform reached two-legged walking immediately after the in-house actuator was applied.
The In-House Actuator, DIDEN Robotics' Technical and Commercial Foundation
The in-house actuator is, at the same time, DIDEN Robotics' technical foundation and its commercial foundation. For a robot that has to operate in industrial sites every day, and ship not as a single unit but as tens or hundreds of units, the team needs control over the spec, the cost, the robustness, and the manufacturability of its core components.
The actuator sits at the deepest part of the robot. It is invisible from the outside, and the user has no reason to think about it. But when that one component cannot hold its weight, every capability built on top of it — locomotion control, self-localization, environmental perception — wavers along with it.
DIDEN Robotics, the Physical AI company built for industrial environments, chose to build from the actuator because a robot that actually works on an industrial floor is, in the end, decided down there.
South Korea
©Copyright DIDEN Robotics. All Right Reserved
Terms of Service
|
Privacy Policy
|
Legal Notice
|
Prohibition of Unauthorized Email Collection
Diden Robotics Co., Ltd.
|
Representative: Junny(Joon-Ha) Kim
|
Contact: diden@didenrobotics.com / Phone: 02-6959-0642 / Fax: 02-6959-0643
|
49 Achasan-ro 17-gil, Seongdong-gu, Seoul, Rooms 401, 402, 409, 410 (04799)
|
Business Registration Number: 867-87-03056
DIDEN ROBOTICS